국내 연구진이 소금쟁이처럼 물 위에서 뛸 수 있는 초경량 로봇을 개발했다.
서울대 기계항공공학부의 김호영·조규진 교수 공동 연구팀은 물 위 소금쟁이가 물의 표면장력을 최대한 이용해 도약하는 방식을 활용한 ‘수상 도약 로봇(water jumping robot)’을 개발했다고 31일 밝혔다.
연구팀의 연구결과는 이날 국제 학술지인 ‘사이언스’ 온라인판에 게재됐다.
연구팀에 따르면 소금쟁이는 물 위에서 뛰어오를 때 단순히 수면을 아래로 누르지 않고서 넓게 벌렸던 다리 4개를 가운데로 모으고서 위로 뛰어오른다. 다리를 가운데로 모으는 시간을 최대한 끌어 가속에 필요한 힘을 벌고, 물을 누르는 힘도 표면장력이 버틸 수 있는 한계치 이하로 조절해 물 아래로 빠지는 일 없이 힘차게 도약한다.
연구팀은 이런 소금쟁이의 도약 특성 연구 결과를 바탕으로 소금쟁이처럼 표면 장력을 최대한 활용해 효율적으로 점프하는 로봇을 만들어냈다.
벼룩의 도약기관 구조를 따라 한 ‘토크 역전 메커니즘’을 활용해 소금쟁이의 다리 회전(모으기) 및 추력 곡선을 모사했고, 구동장치(actuator)의 최대 추력도 표면 장력 허용 한계를 넘지 않도록 설계했다.
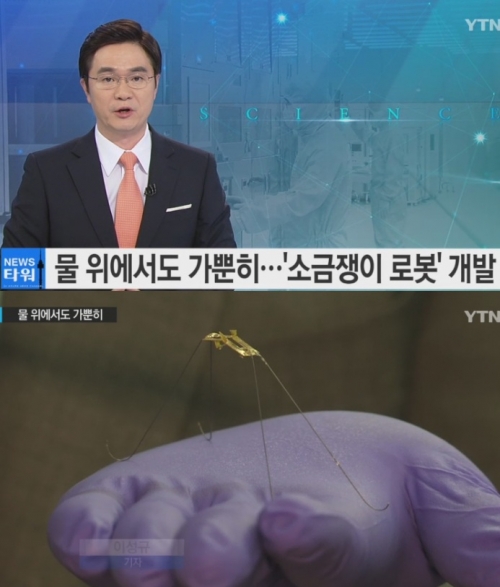
이런 구동 장치에 가늘고 긴 형상 합금 다리 4개를 연결해 몸무게가 단 68㎎에 불과한 로봇을 구현했다. 로봇의 구동장치는 외부에서 열을 가하면 움직이도록 했다.
연구팀은 이 로봇이 수면 아래로 발이 빠지지 않은 채 표면장력을 최대한 이용해 도약하는 것은 물론 뛰는 높이도 지상에서 뛰는 만큼 오를 수 있다고 설명했다.
이번 연구는 생물학자와 유체역학자, 로봇공학자의 노력이 합쳐져서 이룬 융합연구의 모범 사례로 평가된다.
조규진 서울대 기계항공공학부 교수는 “멀리 생각하면 초소형 정찰 로봇에 쓸 수 있겠지만, 이 원리를 활용한다면 의학이나 생산 등 여러 분야에 쓸 수 있다고 생각한다”고 전했다.

![가상자산 매도 물량 나올만큼 나왔다…저점 탐색 구간[머니 대이동 2026 下-③]](https://img.etoday.co.kr/crop/140/88/2297240.jpg)
![갈수록 커지는 IP 분쟁...중심엔 AI [글로벌 IP전쟁 ①]](https://img.etoday.co.kr/crop/140/88/2297385.jpg)
![여자 컬링 4강 진출 좌절…오늘(20일)의 경기 일정 [2026 동계올림픽]](https://img.etoday.co.kr/crop/140/88/2297449.jpg)













![“성경 읽는다는 이유로 촛불 훔칠 수 없어”…지귀연 ‘내란’ 판단 근거는 [尹 무기징역]](https://img.etoday.co.kr/crop/85/60/2297374.jpg)


!['내란 우두머리' 선고에 극명한 희비...서초동은 "무기징역 아쉬워" VS "사법살인" [尹 무기징역]](https://img.etoday.co.kr/crop/85/60/2297341.jpg)

!['낼기' 붐 온다더니⋯차트가 증명한 하우스의 매력 [엔터로그]](https://img.etoday.co.kr/crop/300/170/2297309.jpg)
!['내란 우두머리' 윤석열 1심 무기징역 선고 [포토]](https://img.etoday.co.kr/crop/300/190/2297369.jpg)